楔子
上一篇文章我们介绍了虚拟机是怎么执行字节码指令的,并且还介绍了运行时栈,以及操作运行时栈的一些宏。相信你对字节码执行的整个流程应该有了清晰的认识,那么接下来我们就深入到源码中,进一步考察执行过程。
源码解析字节码指令的执行过程
之前说了,虚拟机就是把自己当成一个 CPU,在栈帧中执行字节码,面对不同的字节码指令,执行不同的处理逻辑。
具体实现由 Python/ceval.c 中的 _PyEval_EvalFrameDefault 函数负责,该函数超级长,并且里面还包含了大量的宏,这些宏完全可以定义在其它的文件中。像我们之前介绍的操作运行时栈的宏,也定义在 _PyEval_EvalFrameDefault 函数里面了。所以为了方便大家理解,我决定先介绍里面出现的宏,等宏说完了之后再看具体的逻辑。
#ifdef HAVE_COMPUTED_GOTOS
#ifndef USE_COMPUTED_GOTOS
#define USE_COMPUTED_GOTOS 1
#endif
#else
#if defined(USE_COMPUTED_GOTOS) && USE_COMPUTED_GOTOS
#error "Computed gotos are not supported on this compiler."
#endif
#undef USE_COMPUTED_GOTOS
#define USE_COMPUTED_GOTOS 0
#endif
// 如果使用 "计算跳转",导入静态跳转表
#if USE_COMPUTED_GOTOS
/* Import the static jump table */
#include "opcode_targets.h"
里面出现了一个关键词:计算跳转,这是什么意思呢?
首先 _PyEval_EvalFrameDefault(后续简称为帧评估函数)的代码量虽然很大,但它的核心不难理解,就是循环遍历字节码指令集,处理每一条指令。而当一条指令执行完毕时,虚拟机会有以下三种动作之一:
- 停止循环、退出帧评估函数,当执行的指令为 RETURN_VALUE、YIELD_VALUE 等。
- 执行指令的过程中出错了,比如执行 GET_ITER 指令,但对象不具备可迭代的性质。那么要进行异常处理(或者直接抛出异常),然后退出帧评估函数。
- 执行下一条指令。
前面两种动作没啥好说的,关键是第三种,如何执行下一条指令。首先虚拟机内部有一个巨型的 switch 语句,伪代码如下:
int opcode;
int oparg;
for (;;) {
// 循环遍历指令集,获取指令和指令参数
opcode = ...; // 指令
oparg = ...; // 指令参数
// 执行对应的处理逻辑
switch (opcode) {
case LOAD_CONST:
处理逻辑;
case LOAD_FAST:
处理逻辑;
case LOAD_FAST:
处理逻辑;
case BUILD_LIST:
处理逻辑;
case DICT_UPDATE:
处理逻辑;
// ...
}
}
一个 case 分支,对应一个字节码指令的实现,由于指令非常多,所以这个 switch 语句也非常庞大。然后遍历出的指令,会进入这个 switch 语句进行匹配,执行相应的处理逻辑。所以循环遍历 co_code 得到字节码指令,然后交给内部的 switch 语句、执行匹配到的 case 分支,如此周而复始,最终完成了对整个 Python 程序的执行。
其实到这里,你应该已经了解了帧评估函数的整体结构。说白了就是将自己当成一个 CPU,在栈帧中执行一条条指令,而执行过程中所依赖的常量、变量等,则由栈帧的其它字段来维护。因此在虚拟机的执行流程进入了那个巨大的 for 循环,并取出第一条字节码指令交给里面的 switch 语句之后,第一张多米诺骨牌就已经被推倒,命运不可阻挡的降临了。一条接一条的指令如同潮水般涌来,浩浩荡荡,横无际涯。
虽然在概念上很好理解,但很多细节被忽略掉了,本篇文章就将它们深挖出来。还是之前的问题,当一个指令执行完毕时,怎么执行下一条指令。
估计有人对这个问题感到奇怪,在 case 分支的内部加一行 continue 进行下一轮循环不就行了吗?没错,这种做法是行得通的,但存在性能问题。因为 continue 会跳转到 for 循环所在位置,所以遍历出下一条指令之后,会再次进入 switch 语句进行匹配。尽管逻辑上是正确的,但 switch 里面有数百个 case 分支,如果每来一个指令,都要顺序匹配一遍的话,那么效率必然不高。
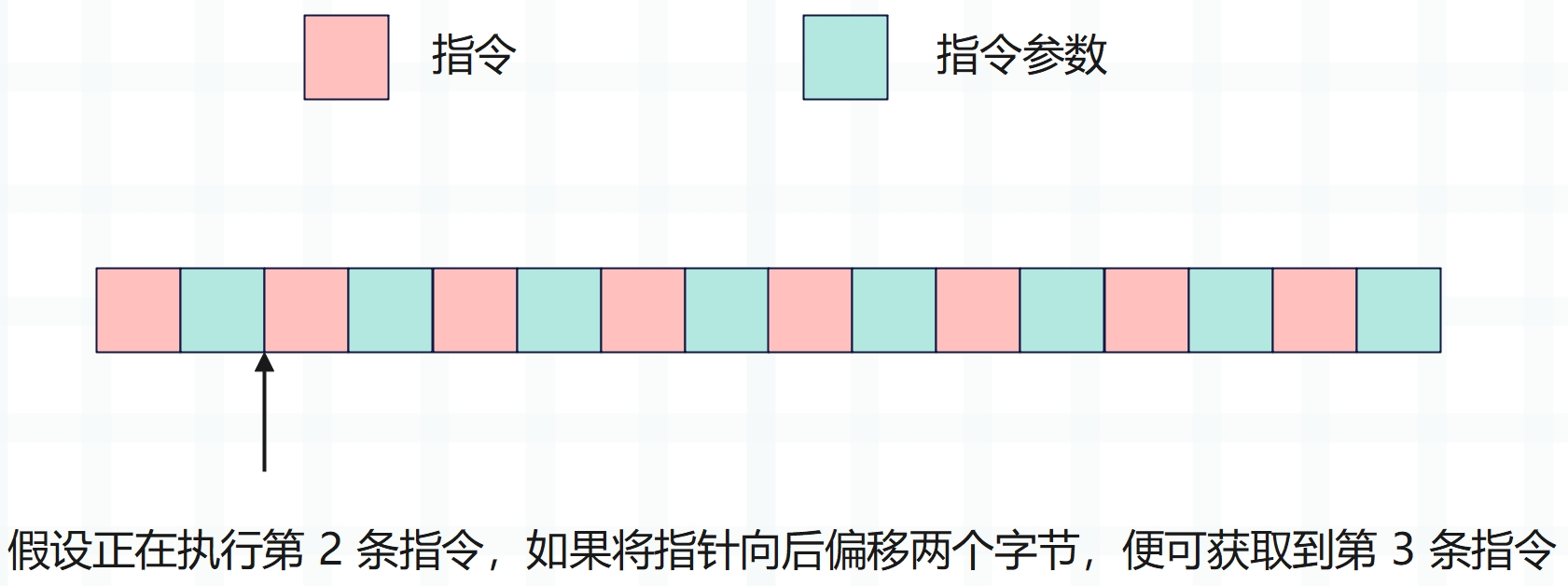
而事实上整个字节码指令集是已知的,所以不管执行哪个指令,我们都可以提前得知它的下一个指令,只需将指针向后偏移两个字节即可。
那么问题来了,既然知道下一条要执行的指令是什么,那么在当前指令执行完毕时,可不可以直接跳转到下一条指令对应的 case 分支中呢?
答案是可以的,这个过程就叫做计算跳转,通过标签作为值即可实现。关于什么是标签作为值,我们用一段 C 代码解释一下。
#include <stdio.h>
void label_as_value(int jump) {
int num = 4;
void *label;
switch (num) {
case 1:
printf("%d\n", 1);
break;
// 在 case 2 分支里面定义了一个标签叫 two
case 2: two: {
printf("%d\n", 2);
break;
}
// 在 case 3 分支里面定义了一个标签叫 three
case 3: three: {
printf("%d\n", 3);
break;
}
case 4:
printf("%d\n", 4);
// 如果参数 jump 等于 2,保存 two 标签的地址
// 如果参数 jump 等于 3,保存 three 标签的地址
if (jump == 2) label = &&two;
else if (jump == 3) label = &&three;
// 跳转到指定标签
goto *label;
default:
break;
}
}
int main() {
label_as_value(2);
// 4
// 2
label_as_value(3);
// 4
// 3
}
由于变量 num 等于 4,所以会进入 case 4 分支,在里面有一个 goto *label。如果你对 C 不是特别熟悉的话,估计会有些奇怪,觉得不应该是 goto label 吗?如果是 goto label,那么需要显式地定义一个名为 label 的标签,但这里并没有。我们的目的是跳转到 two 标签或 three 标签,具体跳转到哪一个,则由参数控制。因此可以使用 && 运算符,这是 GCC 的一个扩展特性,叫做标签作为值,它允许我们获取标签的地址作为一个值。
所以在开头声明了一个 void *label,然后让 label 保存标签地址,再通过 goto *label 跳转到指定标签。由于 *label 代表哪个标签是在运行时经过计算才能知晓,因此称为计算跳转(在运行时动态决定跳转目标)。
注意:
goto *&&标签名属于高级的、非标准的 C 语言用法。
那么毫无疑问,解释器也一定为处理指令的 case 分支定义了相应的标签,并拿到了这些标签的地址。没错,这些标签地址位于 Python/opcode_targets.h 中,这个 opcode_targets.h 就是上面的帧评估函数导入的头文件。
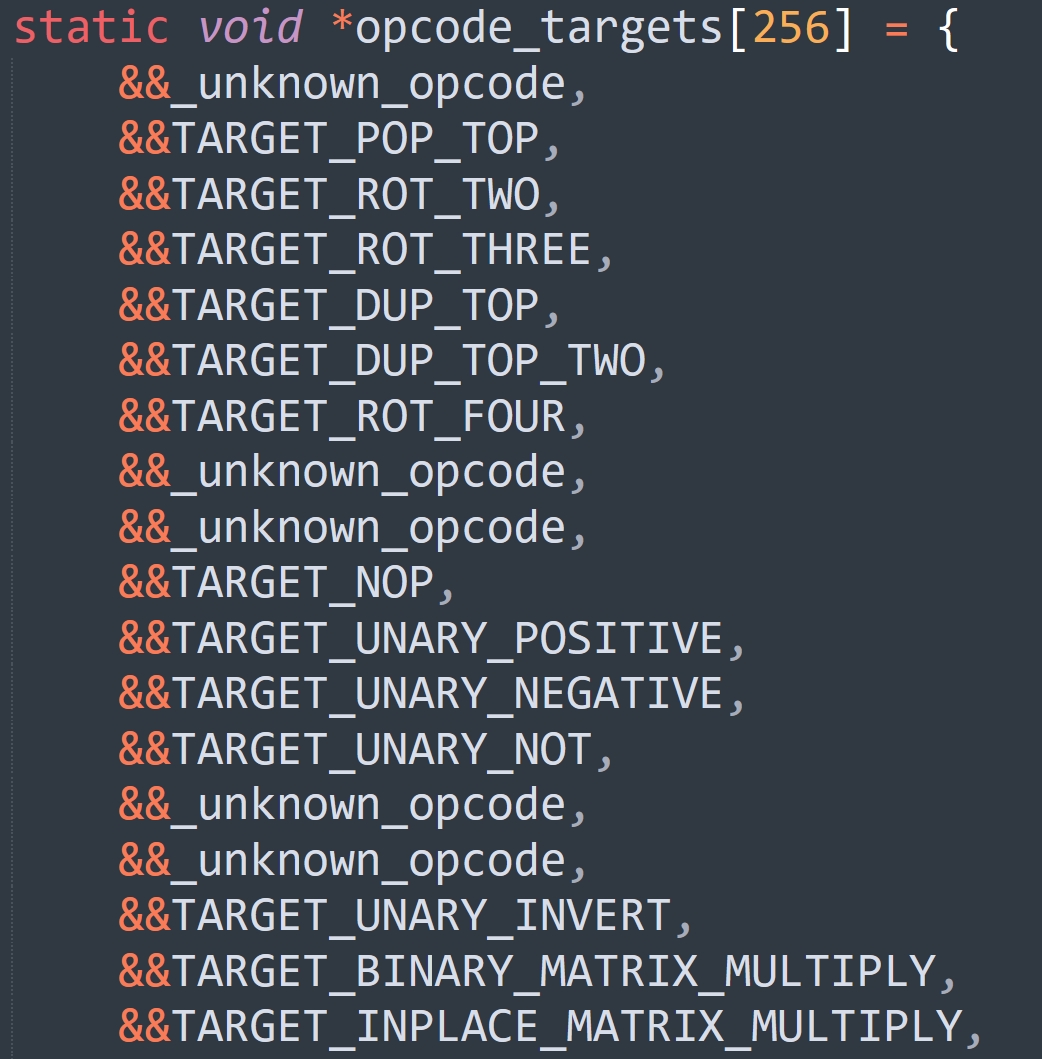
每个指令的处理逻辑都会对应一个标签,这些标签的地址全部保存在了数组中,执行帧评估函数时导入进来即可。这里可能有人会问,导入数组时,它里面的标签都还没有定义吧。确实如此,不过没关系,对于 C 来说,标签只要定义了,那么它在函数的任何一个位置都可以使用。
假设要执行的下一条指令为 opcode,那么就会跳转到 *opcode_targets[opcode],因此我们有理由相信,指令和 opcode_targets 数组的索引之间存在某种关联。而这种关联也很好想,opcode_targets[opcode] 指向的标签,其内部的逻辑就是用来处理 opcode 指令的,我们来验证一下。
#define LOAD_CONST 100
#define LOAD_NAME 101
比如 LOAD_CONST 的值为 100,那么 opcode_targets[100] 肯定会指向 TARGET_LOAD_CONST 标签;LOAD_NAME 的值为 101,那么 opcode_targets[101] 肯定会指向 TARGET_LOAD_NAME 标签。
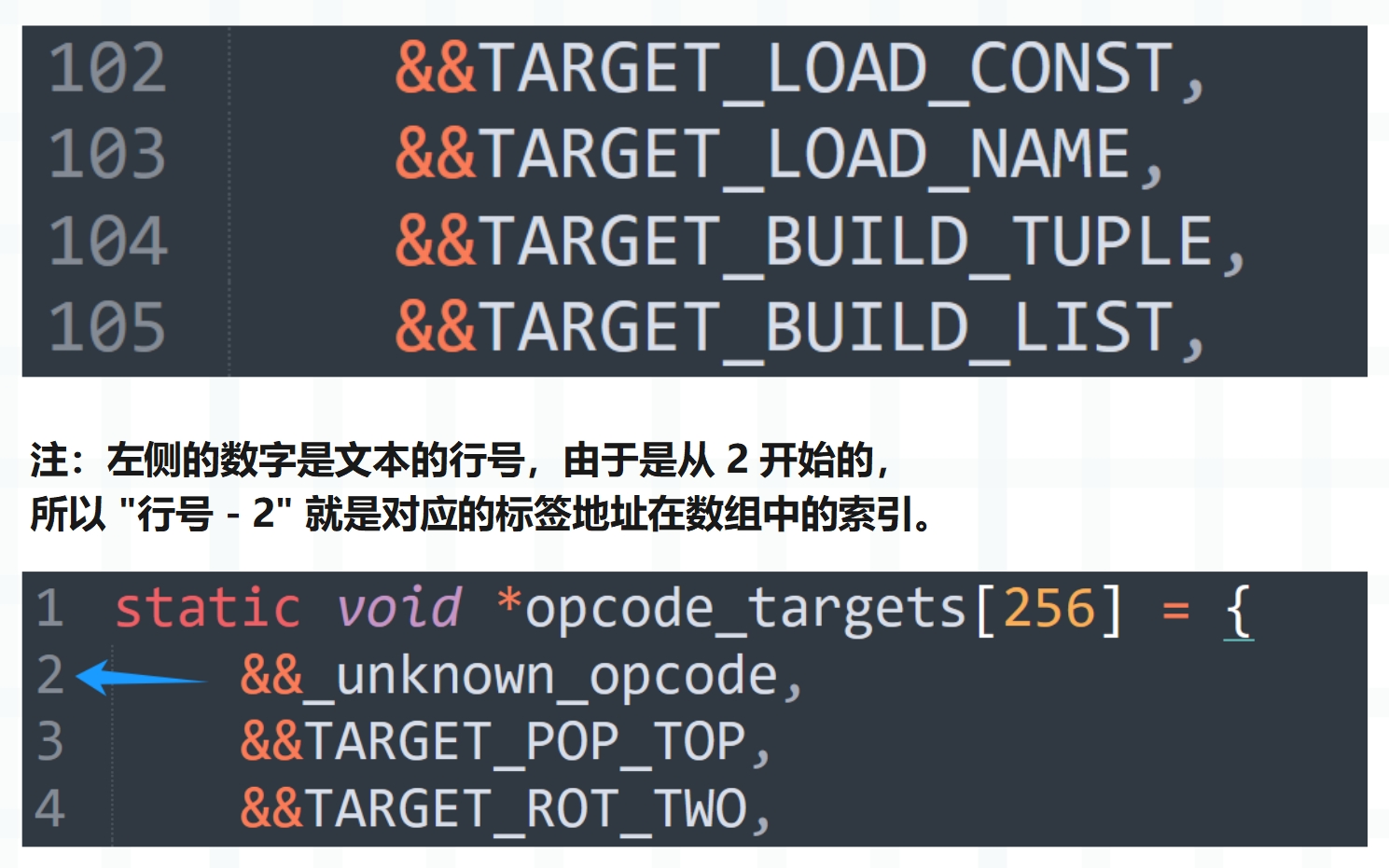
结果没有问题,其它指令也是一样的,通过计算跳转,可以直接 goto 到指定的标签。
好,我们总结一下,首先帧评估函数内部有一个巨型的 switch,每一个指令的处理逻辑都对应一个 case 分支,由于指令有一百多个,所以 case 分支也有一百多个。而当指令进入 switch 后,显然会顺序匹配这一百多个 case 分支,找到符合条件的那一个。
整个过程的逻辑是没问题的,但效率上还可以更进一步优化,因为整个字节码指令集是已知的,既然都提前知道了下一条待处理的指令是什么,那完全可以直接跳转到对应的 case 分支中。所以每个 case 分支都会对应一个标签,我们看一下源码。
这个 TARGET 是一个宏,也定义在帧评估函数中。
#define TARGET(op) \
op: \
TARGET_##op
// 所以 case TARGET(LOAD_CONST): 展开之后就会变成
// case LOAD_CONST: TARGET_LOAD_CONST:
所以在指令的名称前加一个 TARGET_ 就是对应的标签,比如下一条要执行的指令是 YIELD_VALUE,它等于 86,那么 opcode_targets[86] 就等于 &&TARGET_YIELD_VALUE,指向的标签内部便是 YIELD_VALUE 的处理逻辑,至于其它指令也是同理。
因此读取完下一条指令之后,就不用跳转到开头重新走一遍 switch 了。而是将指令作为索引,从 opcode_targets 拿到标签地址直接跳转即可,并且跳转后的标签内部的逻辑就是用来处理该指令的。
所以底层为每个指令的处理逻辑都定义了一个标签,而标签的地址在数组中的索引,和要处理的指令本身是相等的。
不过要想实现计算跳转,需要 GCC 支持标签作为值这一特性,即 goto *标签地址,至于标签地址是哪一个标签的地址,则在运行时动态计算得出。比如 opcode_targets[opcode] 指向哪个标签无从得知,这取决于 opcode 的值。
goto 标签:静态跳转,标签需要显式地定义好,跳转位置在编译期间便已经固定。
goto *标签地址:动态跳转(计算跳转),跳转位置不固定,可以是已有标签中的任意一个。至于具体是哪一个,需要在运行时经过计算才能确定。
以上就是计算跳转,我们继续往下说。
// 如果使用了计算跳转
#define FAST_DISPATCH() \
{ \
if (!_Py_TracingPossible(ceval) && !PyDTrace_LINE_ENABLED()) { \
f->f_lasti = INSTR_OFFSET(); /* 将当前指令的偏移量赋值给 f_lasti */ \
NEXTOPARG(); /* 获取下一条指令 */ \
goto *opcode_targets[opcode]; /* 跳转到对应的标签中 */ \
} \
goto fast_next_opcode; \
}
#define DISPATCH() \
{ \
if (!_Py_atomic_load_relaxed(eval_breaker)) { \
FAST_DISPATCH(); \
} \
continue; \
}
#define TARGET(op) \
op: \
TARGET_##op
// 如果不使用计算跳转
#define TARGET(op) op
#define FAST_DISPATCH() goto fast_next_opcode
#define DISPATCH() continue
每条指令在执行的最后,都会调用 DISPATCH() 或 FAST_DISPATCH(),我们看一下源码。
如果不使用计算跳转,那么 DISPATCH() 就等价于 continue,直接进行下一轮 for 循环,然后进入 switch。而 FAST_DISPATCH() 会跳转到 fast_next_opcode 标签,该标签定义在 for 循环的里面,switch 的外面,所以它虽然不用从 for 循环的位置开始执行,但依然要走一遍完整的 switch。另外由于不使用计算跳转,那么 case 分支里的标签也就没意义了,所以 case TARGET(op) 就等价于 case op。
如果使用计算跳转,那么就是之前说的那样,在指令执行完之后(并且没有中断请求)会调用 NEXTOPARG() 获取下一条指令,然后通过 goto *opcode_targets[opcode] 实现计算跳转,直接跳到下一条指令对应的 case 分支中,从而省去了匹配的时间。
好,我们继续往下看。
// 获取元组 v 中索引为 i 的元素
#define GETITEM(v, i) PyTuple_GetItem((v), (i))
/* 在遍历字节码指令序列时,会用到以下两个变量
* first_instr:永远指向字节码指令序列的第一条指令
* next_instr:永远指向下一条待执行(或正在执行)的字节码指令
* 另外由于每条字节码指令都会带有一个参数
* 所以 first_instr 和 next_instr 的类型都是 _Py_CODEUNIT *,即 uint16_t *
* 其中前 8 位表示指令,后 8 位表示指令参数
*/
// 在调用 NEXTOPARG() 之前,next_instr 指向正在执行的字节码指令
// 如果调用了 NEXTOPARG(),那么 next_instr 就会指向下一条待执行的字节码指令
// 该宏计算的显然就是它和第一条指令(或者说字节码指令序列的起始位置)之间的偏移量
#define INSTR_OFFSET() \
(sizeof(_Py_CODEUNIT) * (int)(next_instr - first_instr))
// 获取 next_instr 指向的 uint16 的前 8 位和后 8 位,也就是拿到指令和指令参数
// 然后执行 next_instr++
#define NEXTOPARG() do { \
_Py_CODEUNIT word = *next_instr; \
opcode = _Py_OPCODE(word); \
oparg = _Py_OPARG(word); \
next_instr++; \
} while (0)
通过 INSTR_OFFSET 和 NEXTOPARG,我们介绍了两个指针变量:first_instr 和 next_instr,虚拟机就是通过它们来完成遍历的。
#define JUMPTO(x) (next_instr = first_instr + (x) / sizeof(_Py_CODEUNIT))
#define JUMPBY(x) (next_instr += (x) / sizeof(_Py_CODEUNIT))
这两个指令等到介绍 if 控制流的时候再说,不过相信你也能猜到它是做什么的,if 控制流的某个分支如果不满足条件,就会跳到下一个分支。而这个跳转过程是怎么实现的呢?显然要借助于这里的 JUMPTO 和 JUMPBY。
// 指令预测
#if defined(DYNAMIC_EXECUTION_PROFILE) || USE_COMPUTED_GOTOS
#define PREDICT(op) if (0) goto PRED_##op
#else
#define PREDICT(op) \
do{ \
_Py_CODEUNIT word = *next_instr; \
opcode = _Py_OPCODE(word); \
if (opcode == op){ \
oparg = _Py_OPARG(word); \
next_instr++; \
goto PRED_##op; \
} \
} while(0)
#endif
#define PREDICTED(op) PRED_##op:
PREDICT 宏和指令预测相关,后续介绍 if 控制流的时候再说。
关于宏就说到这里,至于剩下的一些宏,暂时就先不用看了,我们在后续的部分才会用到它们。
好,既然宏说完了,接下来我们可以看整个帧评估函数都做些什么了,代码有删减。
PyObject* _Py_HOT_FUNCTION
_PyEval_EvalFrameDefault(PyFrameObject *f, int throwflag)
{
// 初始化一些变量,它们的含义等赋值的时候再说
PyObject **stack_pointer;
const _Py_CODEUNIT *next_instr;
int opcode;
int oparg;
PyObject **fastlocals, **freevars;
PyObject *retval = NULL;
_PyRuntimeState * const runtime = &_PyRuntime;
PyThreadState * const tstate = _PyRuntimeState_GetThreadState(runtime);
struct _ceval_runtime_state * const ceval = &runtime->ceval;
_Py_atomic_int * const eval_breaker = &ceval->eval_breaker;
PyCodeObject *co;
int instr_ub = -1, instr_lb = 0, instr_prev = -1;
const _Py_CODEUNIT *first_instr;
PyObject *names;
PyObject *consts;
_PyOpcache *co_opcache;
// ...
// 省略了一堆的宏定义,就是我们上面刚介绍的
// ...
// 检查是否超过递归深度限制
if (Py_EnterRecursiveCall(""))
return NULL;
// tstate->frame 保存当前正在执行的栈桢,所以将 f 赋值给 tstate->frame
// 至于之前的 tstate->frame,则保存在 f.f_back 字段中(在创建栈桢 f 的时候就完成了)
tstate->frame = f;
// 如果启用追踪机制
if (tstate->use_tracing) {
// tstate->c_tracefunc 对应 Python 里的 sys.settrace
// 如果不为空,那么进行调用
// 该函数可以监控每行代码的执行,因此一般用于调试器
if (tstate->c_tracefunc != NULL) {
if (call_trace_protected(tstate->c_tracefunc,
tstate->c_traceobj,
tstate, f, PyTrace_CALL, Py_None)) {
goto exit_eval_frame;
}
}
// tstate->c_profilefunc 对应 Python 里的 sys.setprofile
// 如果不为空,那么进行调用,该函数主要用于性能分析
if (tstate->c_profilefunc != NULL) {
if (call_trace_protected(tstate->c_profilefunc,
tstate->c_profileobj,
tstate, f, PyTrace_CALL, Py_None)) {
goto exit_eval_frame;
}
}
}
// DTrace 是一个强大的动态追踪工具
// 这里检测是否启用了 DTrace 的函数入口探针
if (PyDTrace_FUNCTION_ENTRY_ENABLED())
// 如果启用了 DTrace,则记录函数进入的事件
dtrace_function_entry(f);
// 获取栈桢内部的关键字段
co = f->f_code;
names = co->co_names;
consts = co->co_consts;
fastlocals = f->f_localsplus;
freevars = f->f_localsplus + co->co_nlocals;
assert(PyBytes_Check(co->co_code));
assert(PyBytes_GET_SIZE(co->co_code) <= INT_MAX);
assert(PyBytes_GET_SIZE(co->co_code) % sizeof(_Py_CODEUNIT) == 0);
assert(_Py_IS_ALIGNED(PyBytes_AS_STRING(co->co_code), sizeof(_Py_CODEUNIT)));
// 注意这里的 first_instr,上面已经介绍了,它指向字节码指令序列的起始位置,或者说第一条指令
first_instr = (_Py_CODEUNIT *) PyBytes_AS_STRING(co->co_code);
assert(f->f_lasti >= -1);
// 初始状态下,next_instr 和 first_instr 相等
next_instr = first_instr;
if (f->f_lasti >= 0) {
assert(f->f_lasti % sizeof(_Py_CODEUNIT) == 0);
next_instr += f->f_lasti / sizeof(_Py_CODEUNIT) + 1;
}
stack_pointer = f->f_stacktop;
assert(stack_pointer != NULL);
f->f_stacktop = NULL;
f->f_executing = 1;
// 进入主循环,在这个 for 循环里面一会儿就会看到那个巨型的 switch
main_loop:
// 遍历字节码指令集,处理每一条指令
for (;;) {
// stack_pointer 是栈顶指针,f_valuestack 是栈底指针
// 由于 Python 的运行时栈是基于数组实现的,所以从栈底到栈顶,地址是增大的
// 因此 stack_pointer 一定大于等于 f_valuestack
assert(stack_pointer >= f->f_valuestack);
// STACK_LEVEL() 一定小于等于运行时栈的长度,之前说过的
assert(STACK_LEVEL() <= co->co_stacksize);
// 线程状态对象里面没有异常产生
assert(!_PyErr_Occurred(tstate));
// 检测是否有待处理的中断(比如信号、GIL 释放请求等)
if (_Py_atomic_load_relaxed(eval_breaker)) {
opcode = _Py_OPCODE(*next_instr);
/* 如果指令是以下之一,那么忽略中断,直接跳到 fast_next_opcode 标签进行处理
* SETUP_FINALLY:try / finally 语句的开始
* SETUP_WITH:with 语句的开始
* BEFORE_ASYNC_WITH:async with 语句的开始
* YIELD_FROM:yield from 表达式
*/
// 这种设计主要是为了确保在某些关键操作(如资源管理、异常处理、异步操作)的开始阶段不被中断信号打断
// 从而保证这些操作的正确性和可靠性,进而保证 Python 程序的稳定性和可预测性
if (opcode == SETUP_FINALLY ||
opcode == SETUP_WITH ||
opcode == BEFORE_ASYNC_WITH ||
opcode == YIELD_FROM) {
goto fast_next_opcode;
}
// 使用原子操作检查是否有待处理的信号
// 如果有待处理的信号,那么调用 handle_signals 函数处理它们
// 这个机制允许 Python 程序响应外部事件和系统信号,同时保证执行的正确性
if (_Py_atomic_load_relaxed(&ceval->signals_pending)) {
if (handle_signals(runtime) != 0) {
goto error;
}
}
// 通过原子操作检查是否有待处理的调用需要执行,calls_to_do 是一个计数器,表示待处理的调用的数量
// 如果有待处理的调用,那么执行 make_pending_calls 函数
// pending calls 主要用于垃圾回收(GC)、异步 IO 回调、定时器事件等
// 这个机制是 Python 运行时系统的重要组成部分,允许虚拟机在主循环中处理各种异步任务和周期性任务
// 确保各种后台任务能够得到及时处理,并且不需要使用额外的线程和复杂的调度机制
if (_Py_atomic_load_relaxed(&ceval->pending.calls_to_do)) {
if (make_pending_calls(runtime) != 0) {
goto error;
}
}
// 通过原子操作检查是否有释放 GIL 的请求,如果有,那么该线程就要释放 GIL
if (_Py_atomic_load_relaxed(&ceval->gil_drop_request)) {
// 将当前线程状态设置为 NULL,因为要发生切换了(关于 GIL,后续会单独介绍)
if (_PyThreadState_Swap(&runtime->gilstate, NULL) != tstate) {
Py_FatalError("ceval: tstate mix-up");
}
// 释放 GIL,给其它线程一个机会,不能让某一个线程一直霸占着
// 如果开启了多线程,那么当释放 GIL 的那一刻,就会被其它线程获取
drop_gil(ceval, tstate);
// GIL 释放之后,还要再次获取,但 GIL 已经被其它线程拿走了
// 所以会触发操作系统内核的线程调度机制,进入阻塞状态,等待 GIL 再度回到自己手中
// 因此不难发现,如果有 n 个线程,那么其中的 n - 1 个会陷入阻塞,等待获取 GIL
// 而一旦持有 GIL 的线程执行了 drop_gil 函数,将 GIL 释放了
// 那么这 n - 1 个线程当中就会有一个线程拿到 GIL 并解除阻塞,然后开始执行字节码
// 至于释放 GIL 的线程,则会尝试再次获取 GIL,但会因为获取不到而陷入阻塞(已经被其它线程拿走了)
take_gil(ceval, tstate);
// 检查是否需要快速退出线程(比如在解释器关闭时)
exit_thread_if_finalizing(runtime, tstate);
// 到这里说明 take_gil 返回了(即阻塞状态解除),也意味着拿到了 GIL,那么要恢复线程状态
if (_PyThreadState_Swap(&runtime->gilstate, tstate) != NULL) {
Py_FatalError("ceval: orphan tstate");
}
}
// 检测线程状态中是否存在异步的异常
if (tstate->async_exc != NULL) {
PyObject *exc = tstate->async_exc;
tstate->async_exc = NULL;
UNSIGNAL_ASYNC_EXC(ceval);
_PyErr_SetNone(tstate, exc);
Py_DECREF(exc);
goto error;
}
}
// 以上是一些中断检测逻辑,如果执行顺利,那么会走到这里
fast_next_opcode:
// 保存上一条已执行完毕的字节码的偏移量
f->f_lasti = INSTR_OFFSET();
// 如果启用了 DTrace 行追踪,那么记录行级别的执行信息
if (PyDTrace_LINE_ENABLED())
maybe_dtrace_line(f, &instr_lb, &instr_ub, &instr_prev);
// 检查是否需要执行行级追踪,如果追踪功能可用并且设置了追踪函数,那么执行
// 这是 Python 调试和性能分析功能的核心部分,使得像 pdb 这样的调试器能够逐行执行代码
if (_Py_TracingPossible(ceval) &&
tstate->c_tracefunc != NULL && !tstate->tracing) {
int err;
// 保存当前栈指针
f->f_stacktop = stack_pointer;
// 调用行追踪函数
err = maybe_call_line_trace(tstate->c_tracefunc,
tstate->c_traceobj,
tstate, f,
&instr_lb, &instr_ub, &instr_prev);
// 追踪函数可能改变帧的状态,需要重新加载,并更新栈指针
JUMPTO(f->f_lasti);
if (f->f_stacktop != NULL) {
stack_pointer = f->f_stacktop;
f->f_stacktop = NULL;
}
if (err)
goto error;
}
// 这个宏前面介绍了,它会获取下一条待处理的指令和指令参数
NEXTOPARG();
// 进入 dispatch_opcode 标签
dispatch_opcode:
// 下面这些宏主要用于指令追踪和性能分析,简单了解一下就好
#ifdef DYNAMIC_EXECUTION_PROFILE // 如果启用了动态执行性能分析
#ifdef DXPAIRS // 如果启用了指令对分析
dxpairs[lastopcode][opcode]++; // 记录相邻指令对的出现次数
lastopcode = opcode; // 更新上一个指令
#endif
dxp[opcode]++; // 记录单个指令的执行次数
#endif
#ifdef LLTRACE
// 如果启用了低级追踪,并且追踪开关打开,那么打印偏移量、指令、指令参数等信息
if (lltrace) {
if (HAS_ARG(opcode)) {
printf("%d: %d, %d\n",
f->f_lasti, opcode, oparg);
}
else {
printf("%d: %d\n",
f->f_lasti, opcode);
}
}
#endif
// 好的,关键来了,我们终于来到了这个巨型的 switch
// 一个指令对应一个 case 分支,里面包含了该指令的处理逻辑
// 因为有一百多个 case 分支,所以这个 switch 语句的代码量高达 2300 多行
// 当然啦,也仅仅只是代码量大,但逻辑很单纯,就是定义了一百多条指令的处理逻辑嘛
switch (opcode) {
// NOP 指令的处理逻辑,另外还记得这个 TARGET 宏吗?如果开启了计算跳转,那么分支内部还会定义一个标签
// 此时 case TARGET(NOP) 会展开成 case NOP: TARGET_NOP:
case TARGET(NOP): {
FAST_DISPATCH();
}
// LOAD_FAST 指令的处理逻辑
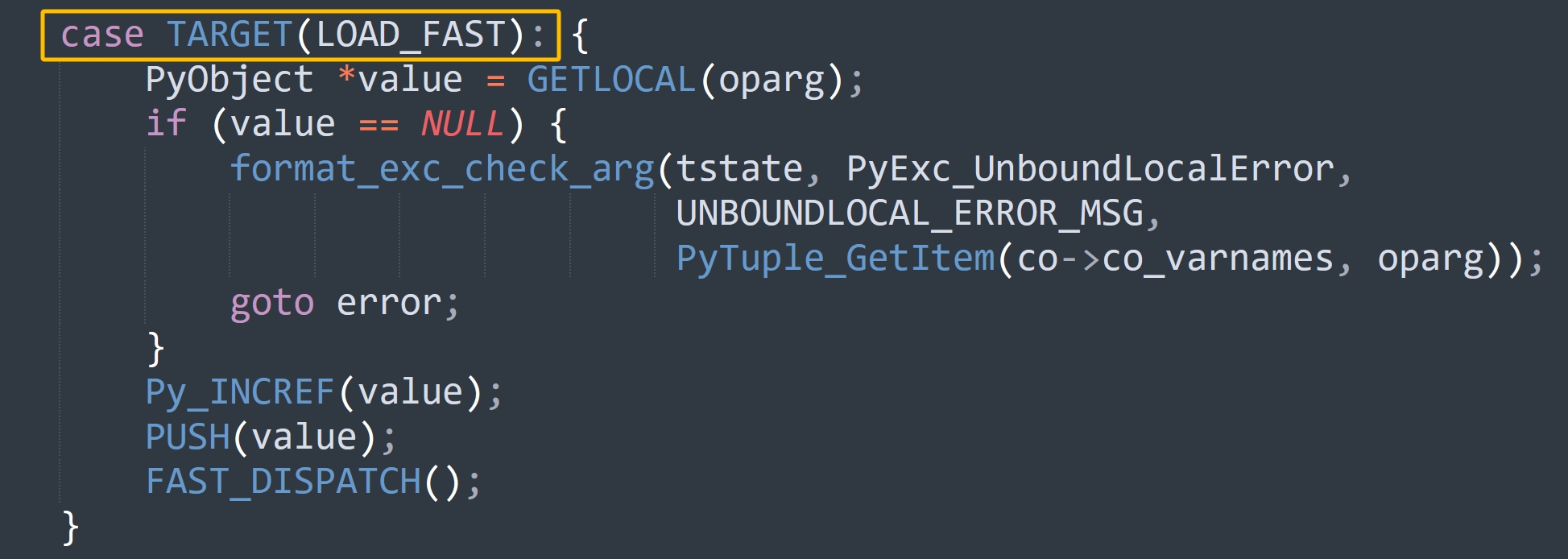
case TARGET(LOAD_FAST): {
PyObject *value = GETLOCAL(oparg);
if (value == NULL) {
format_exc_check_arg(tstate, PyExc_UnboundLocalError,
UNBOUNDLOCAL_ERROR_MSG,
PyTuple_GetItem(co->co_varnames, oparg));
goto error;
}
Py_INCREF(value);
PUSH(value);
FAST_DISPATCH();
}
// LOAD_CONST 指令的处理逻辑
case TARGET(LOAD_CONST): {
PREDICTED(LOAD_CONST);
PyObject *value = GETITEM(consts, oparg);
Py_INCREF(value);
PUSH(value);
FAST_DISPATCH();
}
// STORE_FAST 指令的处理逻辑
case TARGET(STORE_FAST): {
PREDICTED(STORE_FAST);
PyObject *value = POP();
SETLOCAL(oparg, value);
FAST_DISPATCH();
}
// POP_TOP 指令的处理逻辑
case TARGET(POP_TOP): {
PyObject *value = POP();
Py_DECREF(value);
FAST_DISPATCH();
}
// ...
// ...
// ...
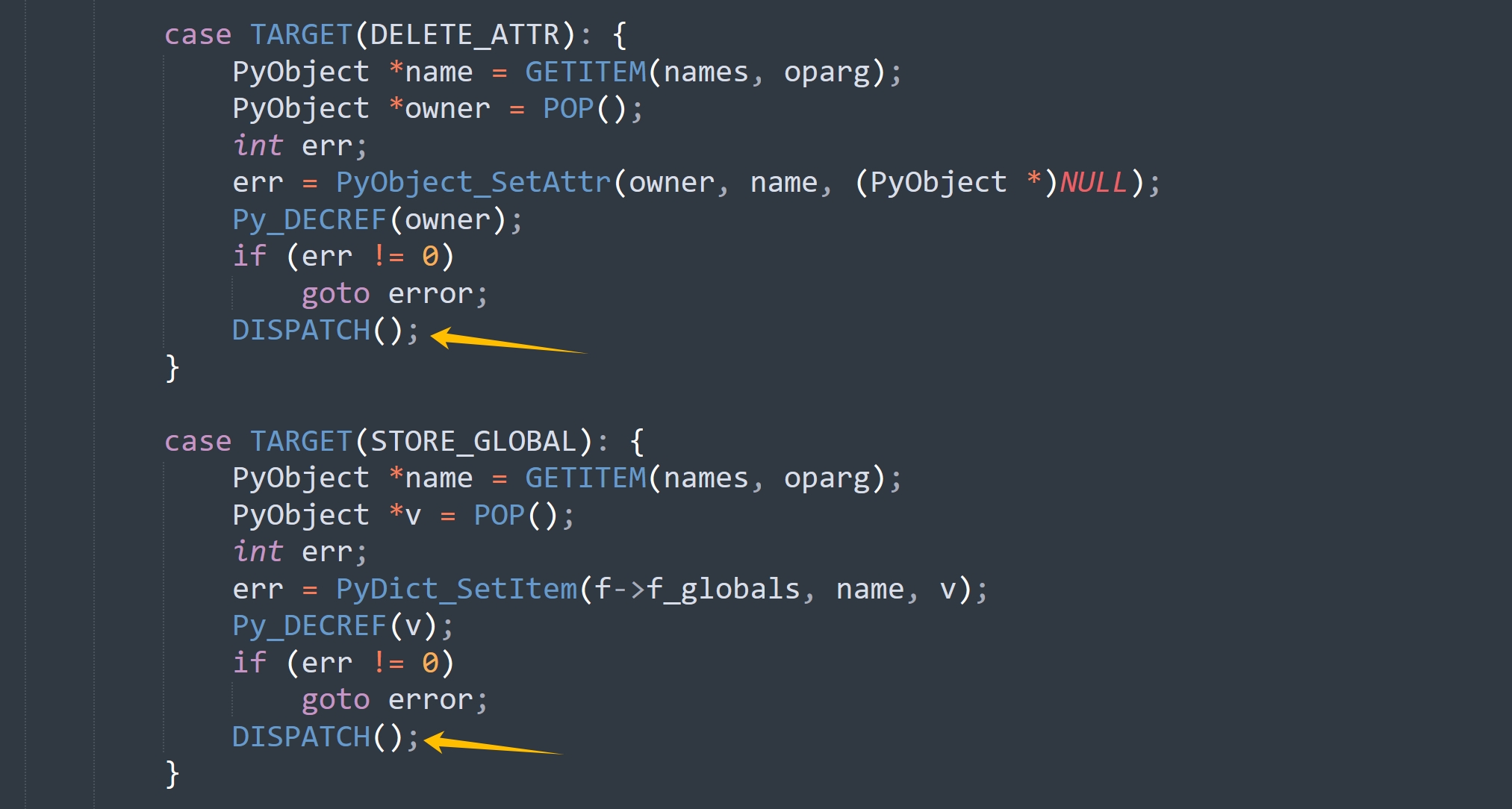
// MAKE_FUNCTION 指令的处理逻辑
case TARGET(MAKE_FUNCTION): {
// ...
PUSH((PyObject *)func);
DISPATCH();
}
// BUILD_SLICE 指令的处理逻辑
case TARGET(BUILD_SLICE): {
// ...
if (slice == NULL)
goto error;
DISPATCH();
}
// FORMAT_VALUE 指令的处理逻辑
case TARGET(FORMAT_VALUE): {
// ...
DISPATCH();
}
// EXTENDED_ARG 指令的处理逻辑
case TARGET(EXTENDED_ARG): {
int oldoparg = oparg;
NEXTOPARG();
oparg |= oldoparg << 8;
goto dispatch_opcode;
}
/* 这些指令内部的具体逻辑,我们后续会聊 */
// 如果执行到这里,说明上面的 case 分支都没有匹配到,意味着出现了一个未知的指令
// 那么打印错误信息:unknown opcde,不过基本不会发生,除非你刻意构造一个不存在的指令
#if USE_COMPUTED_GOTOS
_unknown_opcode:
#endif
default:
fprintf(stderr,
"XXX lineno: %d, opcode: %d\n",
PyFrame_GetLineNumber(f),
opcode);
_PyErr_SetString(tstate, PyExc_SystemError, "unknown opcode");
goto error;
} // 到这里,switch 语句块就结束了
// 这个位置永远不可能到达,因为在每条指令的处理逻辑的最后,要么调用 DISPATCH(),要么 goto error
// 调用 DISPATCH() 会去执行下一条指令,goto error 会跳转到下面的 error 标签
// 当然这里的 Py_UNREACHABLE() 有没有都无所谓,但加上之后会让程序显得更加严谨
Py_UNREACHABLE();
// 如果字节码指令在执行时出错了,那么会设置异常,然后跳转到 error 标签
error:
// 以下是错误处理的防御性代码,用于确保在发生错误时总是设置了适当的异常
// 记得之前介绍过异常的本质,其实就是解释器内部在执行时发现逻辑出问题了(比如索引超出范围)
// 那么会将异常(比如 IndexError)设置在回溯栈中,并立即返回一个表示错误的哨兵值
// 当解释器将返回值传递给 Python 时,会发现返回值为 NULL,知道出异常了
// 于是会将回溯栈里的异常输出到 stderr 当中,就是我们在终端中看到的那一坨红色的东西,然后结束进程
// 但如果解释器发现回溯栈里面没有异常,那么会额外设置一个 SystemError: error return without exception set
// 意思就是:"明明发生错误了,为什么回溯栈里面没有设置异常呢?",一般这个问题会在用 C 编写扩展模块的时候遇到
#ifdef NDEBUG
if (!_PyErr_Occurred(tstate)) {
_PyErr_SetString(tstate, PyExc_SystemError,
"error return without exception set");
}
#else
// 当然如果没有定义 NDEBUG 宏的话,那么就会展开成一个 assert 断言
// 对于解释器本身来说,像这种 assert 断言都是成立的,否则底层源码写的就有问题
assert(_PyErr_Occurred(tstate));
#endif
// 报错时,要生成 traceback,即回溯栈,关于 traceback,等介绍异常捕获的时候再说
PyTraceBack_Here(f);
// 执行追踪函数,用于调试器捕获异常、追踪异常、以及异常处理的监控和分析等
// 在使用 pdb 调试器时,这个机制允许调试器捕获和显示异常信息
if (tstate->c_tracefunc != NULL)
call_exc_trace(tstate->c_tracefunc, tstate->c_traceobj,
tstate, f);
// 这里和异常捕获相关,我们后续再聊
exception_unwind:
while (f->f_iblock > 0) {
// ...
}
break;
} // 到这里,外层的 for 循环就结束了,显然会有两种情况
// 要么字节码都执行完毕了,要么出异常了,但不管是哪种,都意味着要退出栈桢了
assert(retval == NULL);
assert(_PyErr_Occurred(tstate));
// 到这里说明要退出栈桢了,如果运行时栈里面还有元素的话,那么要清空
exit_returning:
while (!EMPTY()) {
PyObject *o = POP();
Py_XDECREF(o);
}
// 生成器在 yield 时的追踪处理逻辑
// 另外像这些追踪函数可以不用太关注,都是用于调试和性能分析的
exit_yielding:
if (tstate->use_tracing) {
if (tstate->c_tracefunc) {
if (call_trace_protected(tstate->c_tracefunc, tstate->c_traceobj,
tstate, f, PyTrace_RETURN, retval)) {
Py_CLEAR(retval);
}
}
if (tstate->c_profilefunc) {
if (call_trace_protected(tstate->c_profilefunc, tstate->c_profileobj,
tstate, f, PyTrace_RETURN, retval)) {
Py_CLEAR(retval);
}
}
}
// 帧评估函数退出时的清理代码
exit_eval_frame:
// 如果启用了 DTrace,记录函数返回事件
if (PyDTrace_FUNCTION_RETURN_ENABLED())
dtrace_function_return(f);
// 退出递归调用,与之前的 Py_EnterRecursiveCall() 相对应
Py_LeaveRecursiveCall();
// 标记帧不再处于执行状态
f->f_executing = 0;
// 当调用一个函数时,会在当前帧的基础上创建新的帧,并将执行权交给新的帧
// 当函数执行完毕时,会销毁栈桢,并将执行权还给上一级栈帧(即调用者的帧),这个过程叫做栈桢回退
// 显然这里要将 f->back 赋值给 tstate->frame,即回退到上一级栈桢
tstate->frame = f->f_back;
// 检查返回值的有效性,确保返回值符合 Python 的调用约定
return _Py_CheckFunctionResult(NULL, retval, "PyEval_EvalFrameEx");
}
以上就是帧评估函数的源码逻辑,总的来说并不难理解,其核心就是通过 for 循环遍历字节码指令集,将遍历出的指令交给内部的 switch 语句,执行对应的 case 分支。当匹配到的 case 分支执行完毕时,会有以下三种情况:
- 停止循环、退出帧评估函数,当执行的指令为 RETURN_VALUE、YIELD_VALUE 等。
- 执行指令的过程中出错了,跳转到 error 标签,然后进行异常处理(或者直接抛出异常)。
- 执行下一条指令,如果开启了计算跳转,那么会精确跳转到下一条指令的处理逻辑中,否则会跳转到 fast_next_opcode 标签的所在位置、或者 for 循环的所在位置。但不管如何,虚拟机接下来的动作就是获取下一条字节码指令和指令参数,完成对下一条指令的执行。
所以通过 for 循环一条一条遍历 co_code 中的字节码指令,然后交给内部的 switch 语句、执行对应的 case 分支,如此周而复始,最终完成了对整个 Python 程序的执行。
相信到此刻你已经彻底了解了 Python 执行引擎的整体结构。说白了虚拟机就是将自己当成一个 CPU,在栈帧中一条条的执行指令,而执行过程中所依赖的常量、变量等,则由栈帧的其它字段来维护。
通过反编译查看字节码
光看源码还是有点枯燥的,下面我们来写一段简单的代码,然后反编译,并通过画图来演示虚拟机是如何执行字节码的。
code = """\
chinese = 89
math = 99
english = 91
avg = (chinese + math + english) / 3
"""
# 将上面的代码以模块的方式进行编译
co = compile(code, "my_module", "exec")
# 查看常量池
print(co.co_consts) # (89, 99, 91, 3, None)
# 查看符号表
print(co.co_names) # ('chinese', 'math', 'english', 'avg')
在编译的时候,常量和符号(变量)都会被静态收集起来。然后我们反编译一下看看字节码,直接通过 dis.dis(co) 即可,结果如下:
1 0 LOAD_CONST 0 (89)
2 STORE_NAME 0 (chinese)
2 4 LOAD_CONST 1 (99)
6 STORE_NAME 1 (math)
3 8 LOAD_CONST 2 (91)
10 STORE_NAME 2 (english)
4 12 LOAD_NAME 0 (chinese)
14 LOAD_NAME 1 (math)
16 BINARY_ADD
18 LOAD_NAME 2 (english)
20 BINARY_ADD
22 LOAD_CONST 3 (3)
24 BINARY_TRUE_DIVIDE
26 STORE_NAME 3 (avg)
28 LOAD_CONST 4 (None)
30 RETURN_VALUE
上面每一列的含义之前说过,这里再重复一下。
- 第一列是源代码的行号;
- 第二列是指令的偏移量,或者说该指令在整个字节码指令序列中的索引。因为每条指令后面都跟着一个参数,所以偏移量是 0 2 4 6 8 ...;
- 第三列是字节码指令,简称指令,它们在宏定义中代表整数;
- 第四列是字节码指令参数,简称指令参数、或者参数,不同的指令参数的含义不同;
- 第五列是 dis 模块给我们额外提供的信息,一会儿说;
我们从上到下依次解释每条指令都干了什么?
0 LOAD_CONST:表示加载一个常量(指针),并压入运行时栈。后面的指令参数 0 表示从常量池中加载索引为 0 的常量,至于 89 则表示加载的常量是 89。所以最后面的括号里面的内容实际上起到的是一个提示作用,告诉你加载的对象是什么。
2 STORE_NAME:表示将 LOAD_CONST 加载的常量用一个名字绑定起来,放在所在的名字空间中。后面的 0 (chinese) 则表示使用符号表中索引为 0 的名字(符号),且名字为 "chinese"。
所以像 chinese = 89 这种简单的赋值语句,会对应两条字节码指令。
然后 4 LOAD_CONST、6 STORE_NAME 和 8 LOAD_CONST、10 STORE_NAME 的作用显然和上面是一样的,都是加载一个常量,然后将某个符号和常量绑定起来,并放在名字空间中。
12 LOAD_NAME:加载一个变量,并压入运行时栈,而后面的 0 (chinese) 表示加载符号表中索引为 0 的变量的值,然后这个变量叫 chinese。14 LOAD_NAME 也是同理,将符号表中索引为 1 的变量的值压入运行时栈,并且变量叫 math。此时栈里面有两个元素,从栈底到栈顶分别是 chinese 和 math。
16 BINARY_ADD:将上面两个变量从运行时栈弹出,然后执行加法操作,并将结果压入运行时栈。
18 LOAD_NAME:将符号表中索引为 2 的变量 english 的值压入运行时栈,此时栈里面有两个元素,从栈底到栈顶分别是 chinese + math 的返回结果和 english。
20 BINARY_ADD:将运行时栈里的两个元素弹出,然后执行加法操作,并将结果压入运行时栈。此时栈里面有一个元素,就是 chinese + math + english 的返回结果。
22 LOAD_CONST:将常量 3 压入运行时栈,此时栈里面有两个元素;
24 BINARY_TRUE_DIVIDE:将运行时栈里的两个元素弹出,然后执行除法操作,并将结果压入运行时栈,此时栈里面有一个元素;
26 STORE_NAME:将元素从运行时栈里面弹出,并用符号表中索引为 3 的变量 avg 和它绑定起来,然后放在名字空间中。
28 LOAD_CONST:将常量 None 压入运行时栈,然后通过 30 RETURN_VALUE 将其从栈中弹出、并返回。
所以 Python 虚拟机就是把自己想象成一个 CPU,在栈帧中一条条执行字节码指令,当指令执行完毕或执行出错时,停止执行。
我们通过几张图展示一下上面的过程,为了阅读方便,这里将相应的源代码再贴一份。
chinese = 89
math = 99
english = 91
avg = (chinese + math + english) / 3
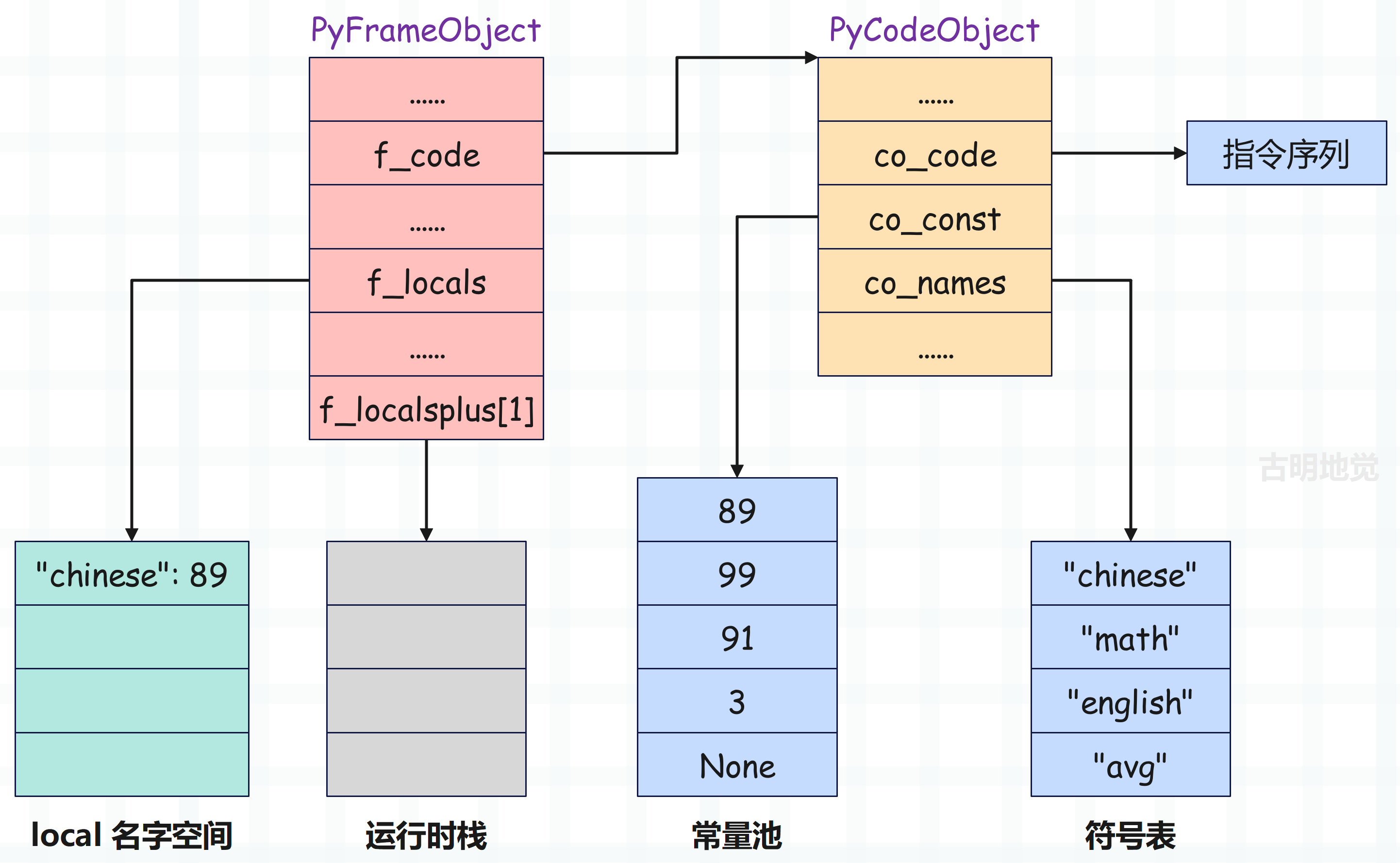
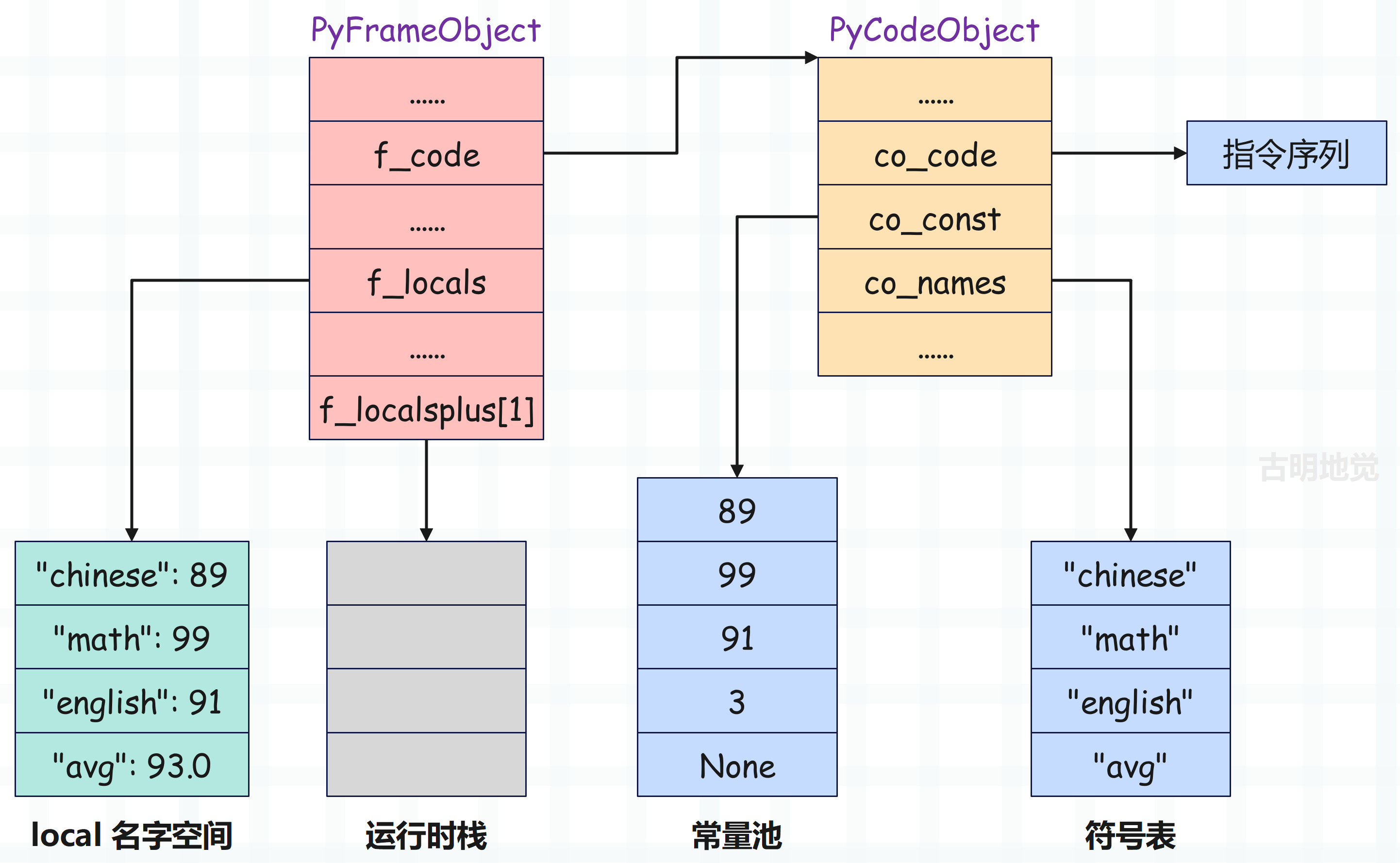
之前说了,模块也有自己的作用域,并且是全局作用域,所以虚拟机也会为它创建栈帧。而在代码还没有执行的时候,栈帧就已经创建好了,整个布局如下。
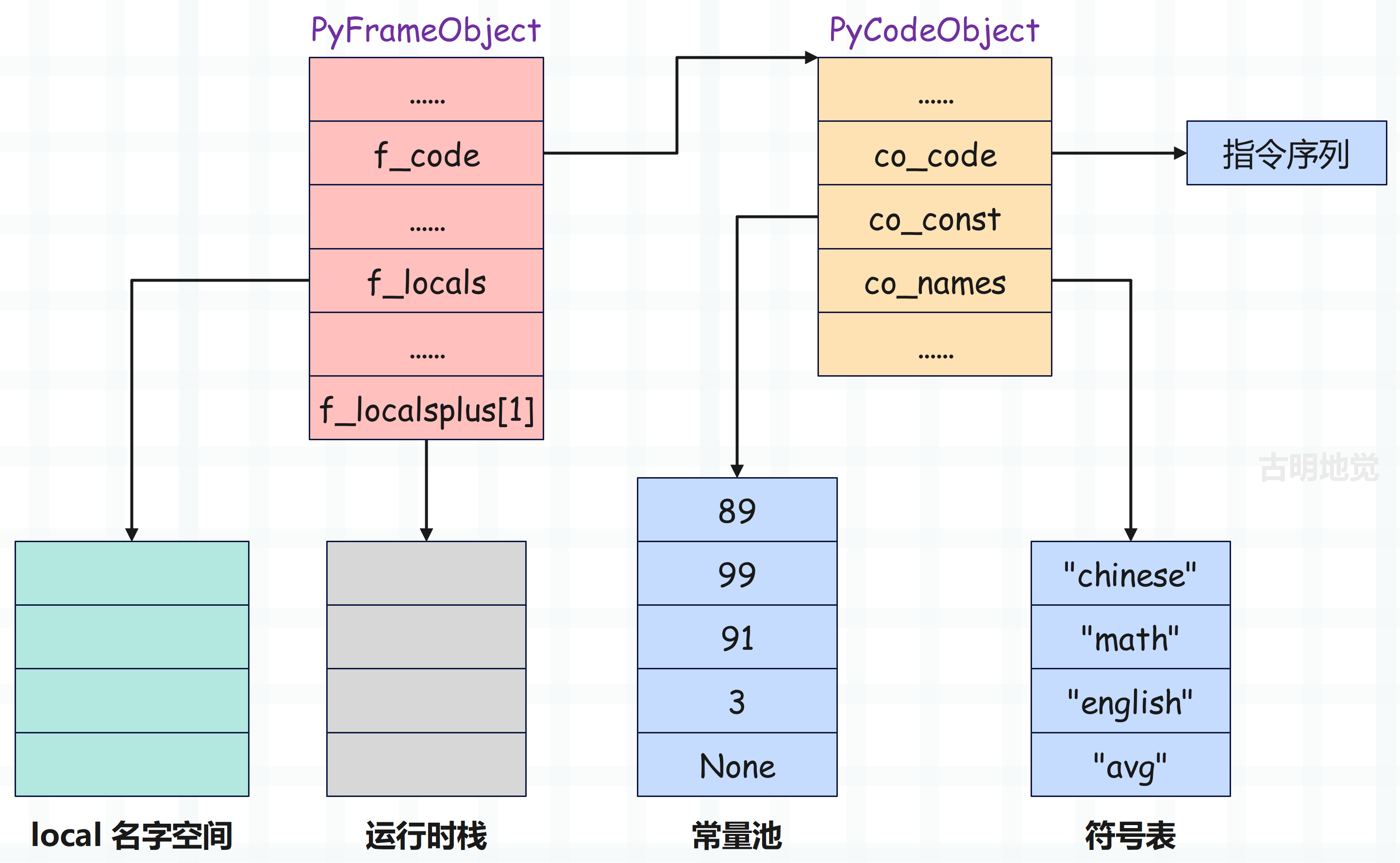
f_localsplus 下面的箭头方向,代表运行时栈从栈底到栈顶的方向。
这里再强调一下 f_localsplus 字段,它是一个柔性数组。虽然声明的时候写着长度为 1,但实际使用时,长度不受限制,和 Go 语言不同,C 数组的长度不属于类型的一部分。然后 f_localsplus 在逻辑上被分成了四份,分别用于局部变量、cell 变量、free 变量、运行时栈,由于当前示例中的代码是以模块的方式编译的,里面所有的变量都是全局变量,而且也不涉及闭包啥的,所以这里就把 f_localsplus 理解为运行时栈即可。
接下来就开始执行字节码了,next_instr 指向下一条待执行的字节码指令,显然初始状态下,下一条待执行的指令就是第一条指令。
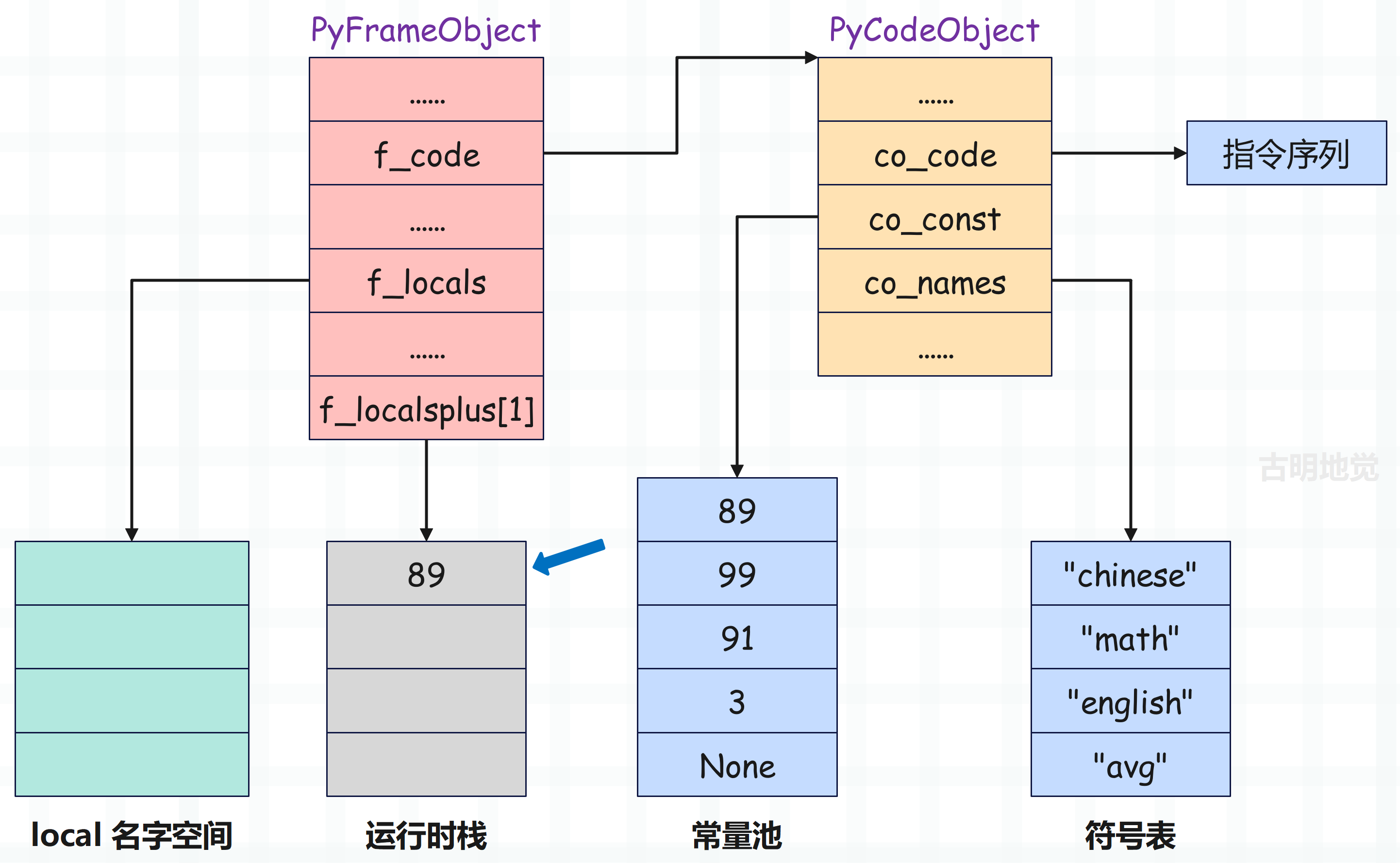
于是虚拟机开始执行 0 LOAD_CONST,该指令表示将常量加载进运行时栈,而要加载的常量在常量池中的索引,由指令参数表示。
在源码中,指令对应的变量是 opcode,指令参数对应的变量是 oparg。
case TARGET(LOAD_CONST): {
PREDICTED(LOAD_CONST);
// 调用元组的 GETITEM 方法,从常量池中加载索引为 oparg 的对象
// 当然啦,为了描述方便我们称之为对象,但其实是指向对象的指针
PyObject *value = GETITEM(consts, oparg);
// 增加引用计数
Py_INCREF(value);
// 压入运行时栈
PUSH(value);
FAST_DISPATCH();
}
该指令的参数为 0,所以会将常量池中索引为 0 的元素 89 压入运行时栈,执行完之后,栈帧的布局就变成了下面这样:
接着虚拟机执行 2 STORE_NAME 指令,从符号表中获取索引为 0 的符号、即 chinese。然后将栈顶元素 89 弹出,再将符号 chinese 和整数对象 89 绑定起来保存到 local 名字空间中。
case TARGET(STORE_NAME): {
// 从符号表中加载索引为 oparg 的符号
// 符号本质上就是一个 PyUnicodeObject 对象
// 这里就是字符串 "chinese"
PyObject *name = GETITEM(names, oparg);
// 从运行时栈的栈顶弹出元素
// 显然是上一步压入的 89
PyObject *v = POP();
// 获取名字空间 namespace
PyObject *ns = f->f_locals;
int err;
// 如果没有名字空间则报错,设置异常
if (ns == NULL) {
_PyErr_Format(tstate, PyExc_SystemError,
"no locals found when storing %R", name);
Py_DECREF(v);
goto error;
}
// 将符号和对象绑定起来放在 ns 中
// 名字空间是一个字典,PyDict_CheckExact 负责检测 ns 是否为字典,等价于 type(ns) is dict
// 除此之外,还有 PyDict_Check(ns),它等价于 isinstance(ns, dict)
if (PyDict_CheckExact(ns))
// 通过字典的特定类型 API 将键值对 "chinese": 89 设置到字典中
err = PyDict_SetItem(ns, name, v);
else
// 走到这里说明 type(ns) 不是 dict,那么它应该继承 dict
// 通过泛型 API 设置元素
err = PyObject_SetItem(ns, name, v);
// 对象的引用计数减 1,因为从运行时栈中弹出了
Py_DECREF(v);
// 如果 err != 0,证明设置元素出错了,跳转至 error 标签
if (err != 0)
goto error;
// 调用 DISPATCH() 执行下一条指令,如果没有开启计算跳转,那么它就相当于一个 continue
DISPATCH();
}
执行完之后,栈帧的布局就变成了下面这样:
此时运行时栈为空,local 名字空间多了个键值对。
同理剩余的两个赋值语句也是类似的,只不过指令参数不同,比如 6 STORE_NAME 加载的是符号表中索引为 1 的符号,10 STORE_NAME 加载的是符号表中索引为 2 的符号,分别是 math 和 english。它们执行完之后,栈桢布局如下:
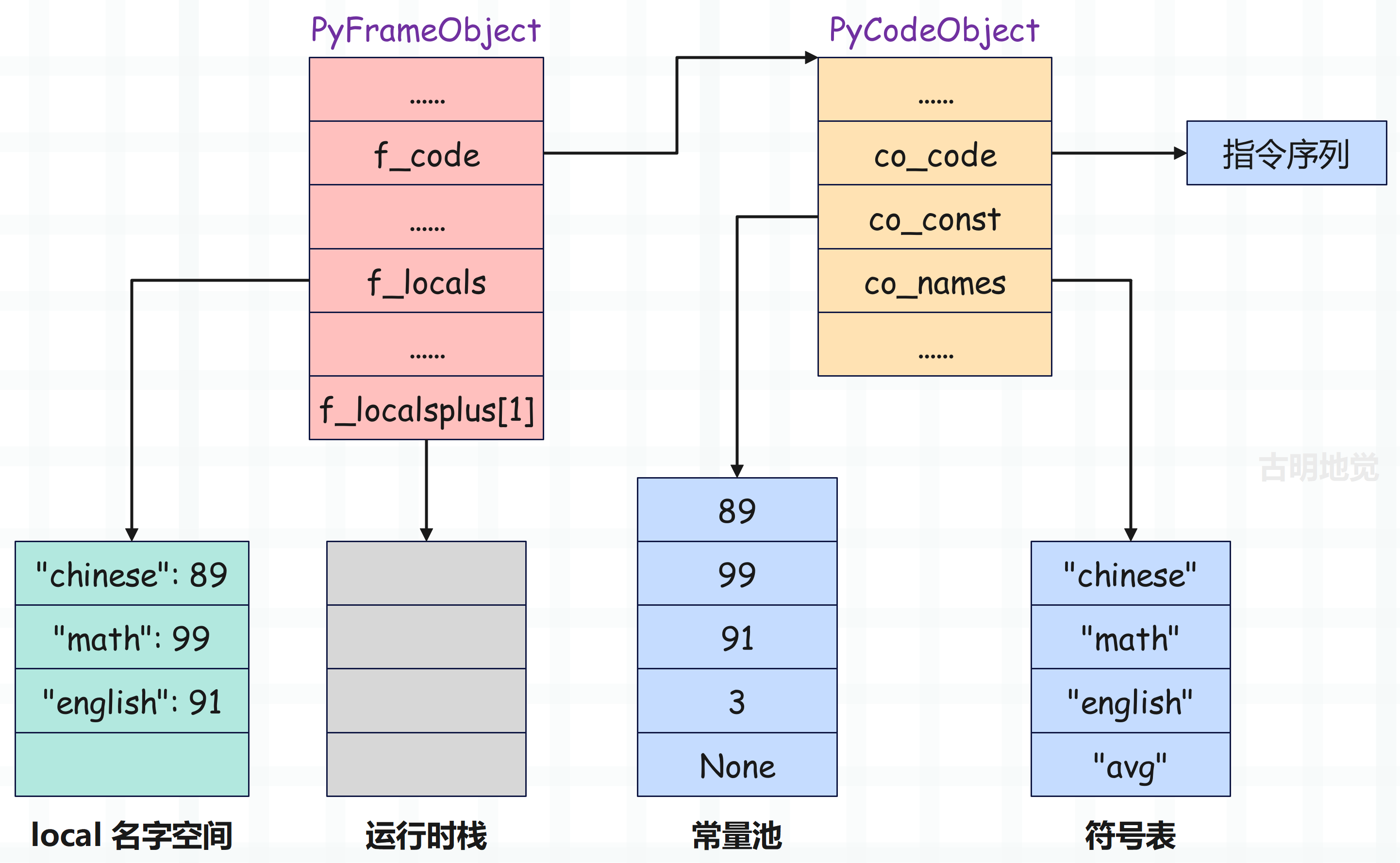
然后 12 LOAD_NAME 和 14 LOAD_NAME 负责将符号表中索引为 0 和 1 的变量的值压入运行时栈:
case TARGET(LOAD_NAME): {
// 从符号表 co_names 中加载索引为 oparg 的变量(符号)
// 但是注意:全局变量是通过字典存储的
// 所以这里的 name 只是一个字符串罢了,比如 "chinese"
// 然后还要再根据这个字符串从字典里面查找对应的 value
PyObject *name = GETITEM(names, oparg);
// 对于模块来说,f->f_locals 和 f->f_globals 指向同一个字典
PyObject *locals = f->f_locals;
PyObject *v;
// local 名字空间一定不为 NULL
if (locals == NULL) {
_PyErr_Format(tstate, PyExc_SystemError,
"no locals when loading %R", name);
goto error;
}
// 如果 type(locals) is dict 为真
if (PyDict_CheckExact(locals)) {
// 根据 name 获取 value,所以 print(chinese) 本质上就是下面这样
// print(locals["chinese"])
v = PyDict_GetItemWithError(locals, name);
if (v != NULL) {
Py_INCREF(v);
}
else if (_PyErr_Occurred(tstate)) {
goto error;
}
}
// 否则说明 type(locals) is dict 为假,但 isinstance(locals, dict) 为真
else {
// 通过泛型 API 获取元素
v = PyObject_GetItem(locals, name);
if (v == NULL) {
if (!_PyErr_ExceptionMatches(tstate, PyExc_KeyError))
goto error;
_PyErr_Clear(tstate);
}
}
// 如果 v 等于 NULL,说明 local 空间不存在
if (v == NULL) {
// 那么从全局名字空间(global 名字空间)获取
v = PyDict_GetItemWithError(f->f_globals, name);
// 如果 v 不等于 NULL,说明获取到了
if (v != NULL) {
Py_INCREF(v);
}
// 否则说明 global 空间也不存在指定的 key
// 这里检测一下是否有异常产生,有的话跳转到 error 标签
else if (_PyErr_Occurred(tstate)) {
goto error;
}
// local 空间和 global 空间都没有,那么该去 builtin 空间查找了
else {
// 逻辑和上面是类似的,如果查找不到,跳转到 error 标签,否则增加引用计数
if (PyDict_CheckExact(f->f_builtins)) {
v = PyDict_GetItemWithError(f->f_builtins, name);
if (v == NULL) {
if (!_PyErr_Occurred(tstate)) {
format_exc_check_arg(
tstate, PyExc_NameError,
NAME_ERROR_MSG, name);
}
goto error;
}
Py_INCREF(v);
}
else {
v = PyObject_GetItem(f->f_builtins, name);
if (v == NULL) {
if (_PyErr_ExceptionMatches(tstate, PyExc_KeyError)) {
format_exc_check_arg(
tstate, PyExc_NameError,
NAME_ERROR_MSG, name);
}
goto error;
}
}
}
}
// 压入运行时栈
PUSH(v);
DISPATCH();
}
上面两条指令执行完之后,栈帧的布局就变成了下面这样:
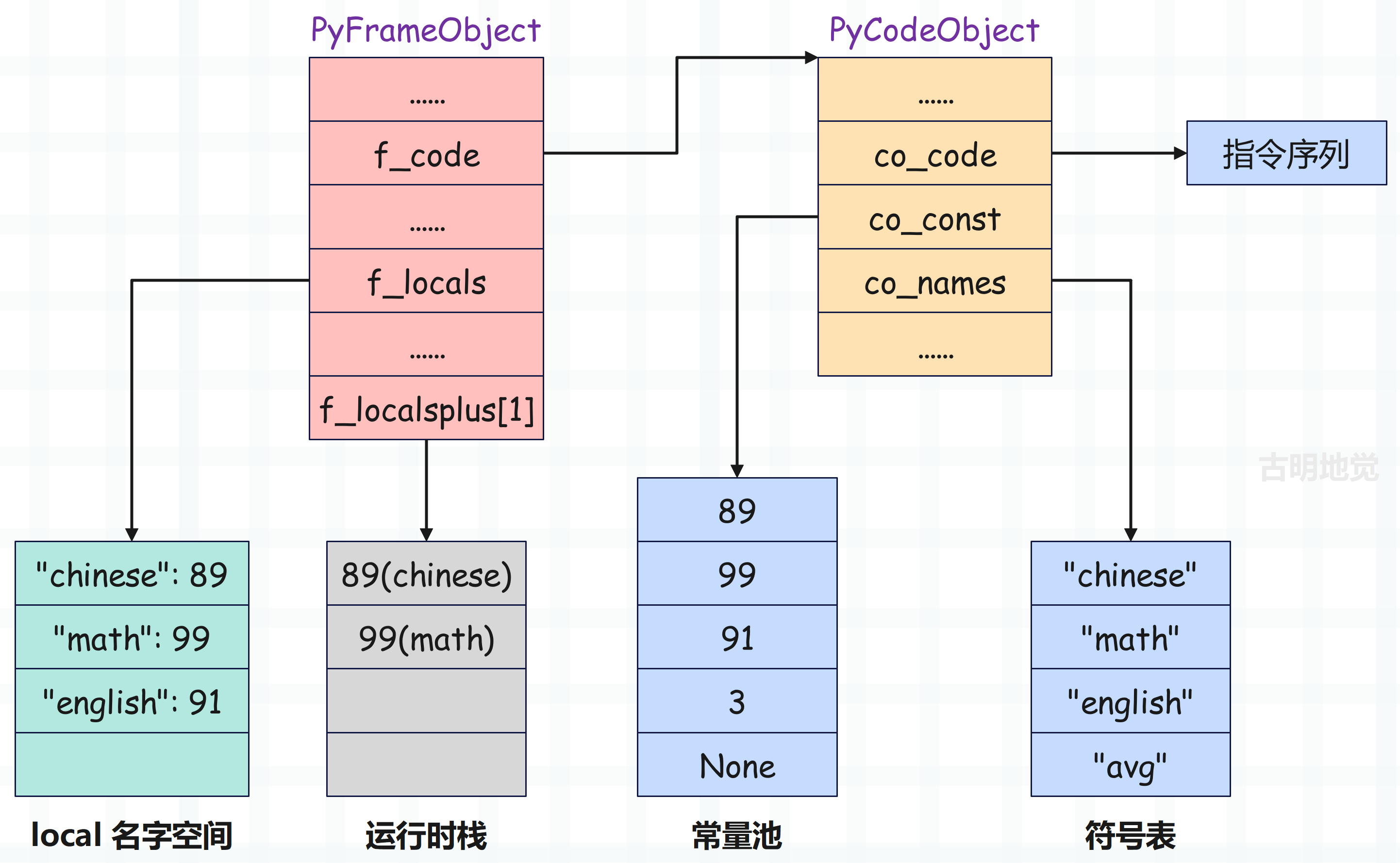
接下来执行 16 BINARY_ADD,它会将栈里的两个元素弹出,然后执行加法操作,最后再将结果入栈。
当然上面这种说法是为了方便理解,其实虚拟机真正执行的时候,只会弹出一个元素,而另一个元素只是使用 TOP() 进行查看,但不弹出。等结果计算完毕之后,再将栈顶元素替换掉。
所以本质上,和弹出两个元素、再将计算结果入栈是一样的。
case TARGET(BINARY_ADD): {
// 从栈顶弹出元素,这里是 99(变量 math)
PyObject *right = POP();
// math 弹出之后,chinese 就成为了新的栈顶元素
// 这里的 TOP() 则是获取栈顶元素 89(变量 chinese)
PyObject *left = TOP();
// 用于保存两者的和
PyObject *sum;
// 如果是字符串,执行专门的函数
if (PyUnicode_CheckExact(left) &&
PyUnicode_CheckExact(right)) {
sum = unicode_concatenate(tstate, left, right, f, next_instr);
}
// 否则通过泛型 API 进行计算
else {
sum = PyNumber_Add(left, right);
Py_DECREF(left);
}
// 减少元素的引用计数
Py_DECREF(right);
// 将栈顶元素替换成 sum
SET_TOP(sum);
if (sum == NULL)
goto error;
DISPATCH();
}
BINARY_ADD 指令执行完之后,栈帧的布局就变成了下面这样:
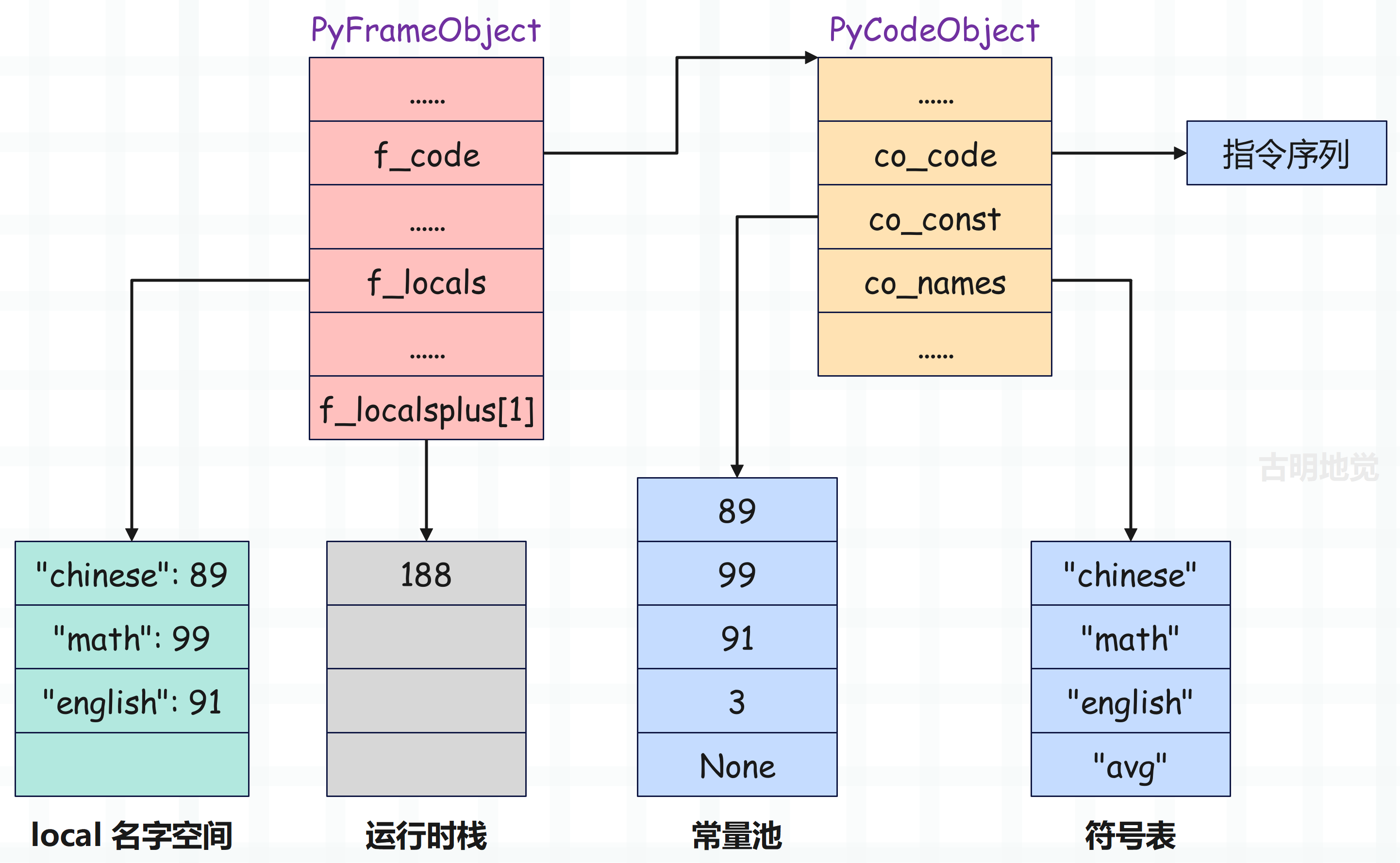
然后 18 LOAD_NAME 负责将符号表中索引为 2 的变量 english 的值压入运行时栈,而指令 20 BINARY_ADD 则是继续执行加法操作,并将结果设置在栈顶,然后 22 LOAD_CONST 将常量 3 再压入运行时栈。
这三条指令执行之后,运行时栈的变化如下:

接着是 24 BINARY_TRUE_DIVIDE,它的逻辑和 BINARY_ADD 类似,只不过一个执行除法,一个执行加法。
case TARGET(BINARY_TRUE_DIVIDE): {
// 从栈顶弹出元素,显然是 3
PyObject *divisor = POP();
// 查看栈顶元素,此时栈顶元素变成了 279
PyObject *dividend = TOP();
// 调用 PyNumber_TrueDivide,执行 279 / 3
PyObject *quotient = PyNumber_TrueDivide(dividend, divisor);
// 减少引用计数
Py_DECREF(dividend);
Py_DECREF(divisor);
// 将栈顶元素替换成 279 / 3 的计算结果
SET_TOP(quotient);
if (quotient == NULL)
goto error;
DISPATCH();
}
当 24 BINARY_TRUE_DIVIDE 执行完之后,运行时栈如下:

然后 26 STORE_NAME 将栈顶元素 93.0 弹出,并将符号表中索引为 3 的变量 avg 和它绑定起来,放到名字空间中。因此最终栈帧关系图如下:
以上就是虚拟机对这几行代码的执行流程,整个过程就像 CPU 执行指令一样。
我们再用 Python 代码描述一遍上面的逻辑:
# LOAD_CONST 将 89 压入栈中,STORE_NAME 将 89 从栈中弹出
# 并将符号 "chinese" 和 89 绑定起来,放在名字空间中
chinese = 89
print(
{k: v for k, v in locals().items() if not k.startswith("__")}
) # {'chinese': 89}
math = 99
print(
{k: v for k, v in locals().items() if not k.startswith("__")}
) # {'chinese': 89, 'math': 99}
english = 91
print(
{k: v for k, v in locals().items() if not k.startswith("__")}
) # {'chinese': 89, 'math': 99, 'english': 91}
avg = (chinese + math + english) / 3
print(
{k: v for k, v in locals().items() if not k.startswith("__")}
) # {'chinese': 89, 'math': 99, 'english': 91, 'avg': 93.0}
现在你是不是对虚拟机执行字节码有更深的了解了呢?当然字节码指令非常多,不止我们上面看到的那几个。你可以随便写一些代码,然后分析一下它的字节码指令是什么。
小结
到此,我们就深入源码,考察了虚拟机执行字节码的流程,帧评估函数虽然很长,也有那么一些复杂,但是核心逻辑不难理解。就是把自己当成一个 CPU,在栈帧中执行字节码指令。
下一篇文章我们来介绍一下常见的几个指令,并探讨不同的变量赋值语句的背后原理。
欢迎大家关注我的公众号:古明地觉的编程教室。

如果觉得文章对你有所帮助,也可以请作者吃个馒头,Thanks♪(・ω・)ノ。